")
")
採血手技訓練シミュレータの開発
現在,看護師養成課程において,教員数,実習時間の不足から学生が卒業までに十分な看護技術を身に着けられない現状がある.特に,身体侵襲を伴う実習に取り組む機会が得にくくなっていることから,臨床場面を疑似体験可能なシミュレータが求められている.シリコン製の腕モデルを利用して採血訓練できるシミュレータが存在し,刺入時の感触を疑似体験可能な利点を有する.しかし,注射器の適切な刺入位置や角度を指導することは容易ではない.
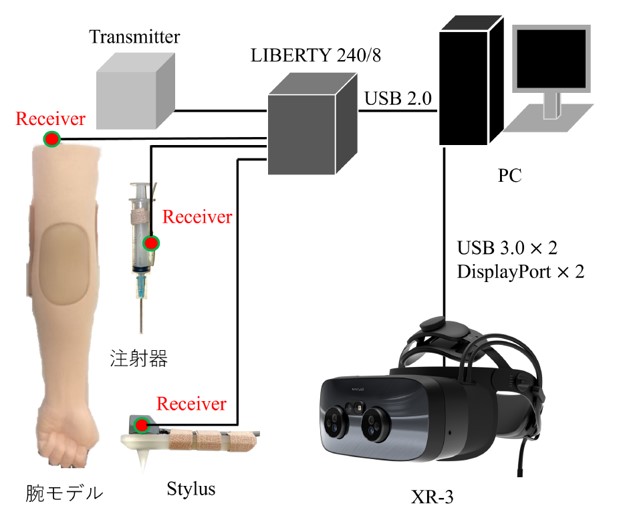
本研究では,XR用HMDであるVarjo XR-3及び磁気式モーションキャプチャ(MoCap)を用いた採血手技訓練シミュレータを開発した.今後,評価実験を通して教育効果の高い情報提示手法を検討する.

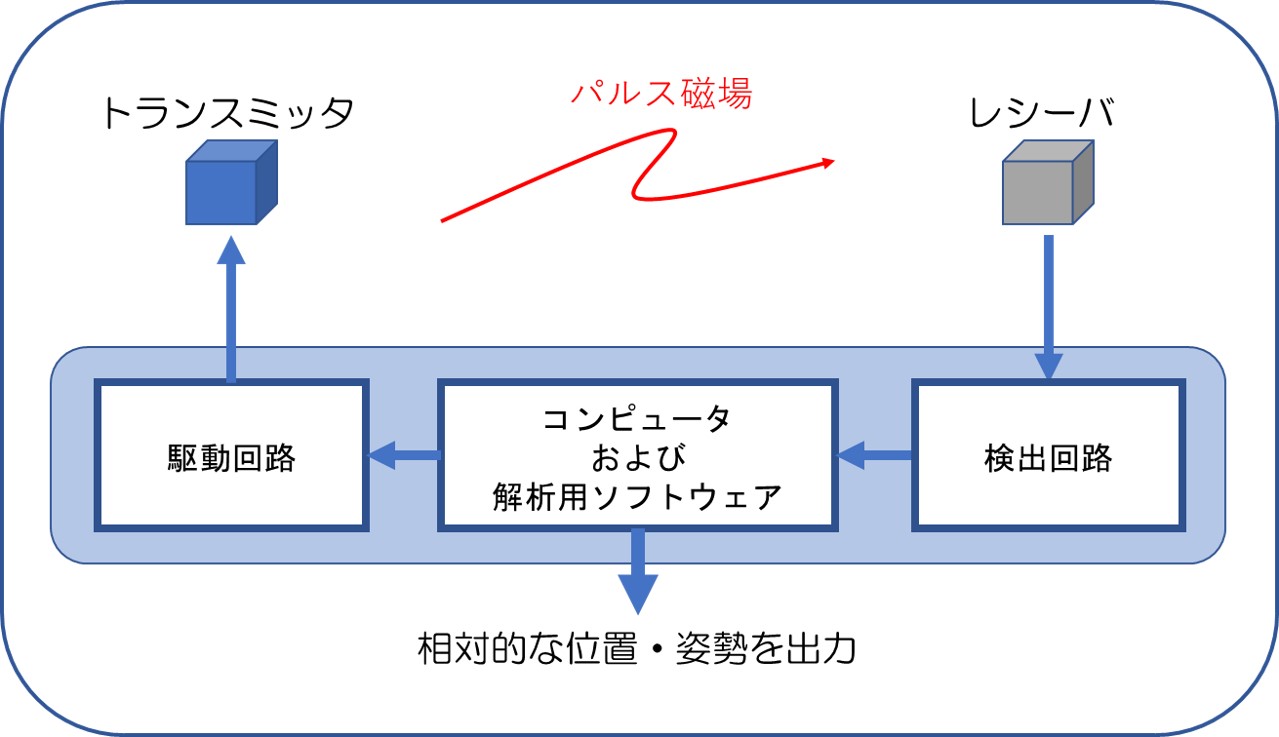
磁気式MoCapの動作原理(Polhemus LIBERTY)
トランスミッタで生成したパルス磁場をレシーバが受け,電磁誘導によりレシーバ内のコイルに電流が流れる.この電流を検出回路,コンピュータ及び解析用ソフトウェアを介してデジタル化することで,トランスミッタに対する レシーバの位置・姿勢が得られる.
レシーバの位置・姿勢の計測には磁場を用いるため,光学式MoCapとは異なり,レシーバがカメラの死角に入るような動作も高分解能で計測できる.一方,磁場に影響する物体を遠ざけるなど,留意点も存在する.
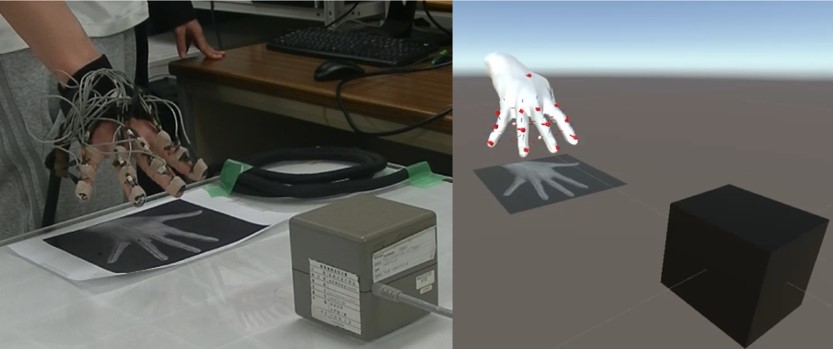
手指巧緻動作再現システムの開発
人間の全身の身体動作はMoCapにより比較的容易に計測でき,仮想空間に再現・可視化できる.一方,個人の手指の動作を再現する場合,手の大きさや指の長さが各々異なる上,手指は可動部が多く指骨も短いため,カメラの死角に入りやすく計測が難しい.そのため,手指のMoCapデータでそのまま仮想空間に描画しても,関節部の回転軸の影響も重なり,実際の指先とエンドポイントがズレる等,高精度な手指巧緻動作を再現できない.
本研究では,手指の3Dスキャンデータを用いて作成したハンドモデルを用い,高分解能な磁気式MoCapの特徴を活かした手指巧緻動作再現システムの構築をめざしている.