")
")

Development of blood collection technique training simulator
Currently, in nursing training programs, students are unable to acquire sufficient nursing skills by the time they graduate due to a lack of teachers and practice time. In particular, it is difficult to obtain opportunities to engage in practical training that involves physical invasion, and there is a need for a simulator that can simulate clinical situations. There are simulators that can train blood collection using a silicon arm model, which has the advantage of simulating the feeling of a needle insertion. However, it is not easy to instruct the appropriate position and angle of syringe insertion.
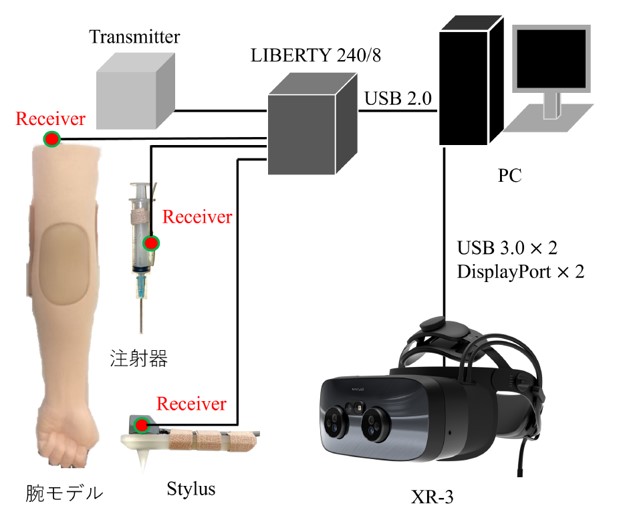
In this study, we developed a blood collection training simulator using the Varjo XR-3 HMD for XR and magnetic motion capture (MoCap). We will investigate a method of presenting information with high educational effect through evaluation experiments.

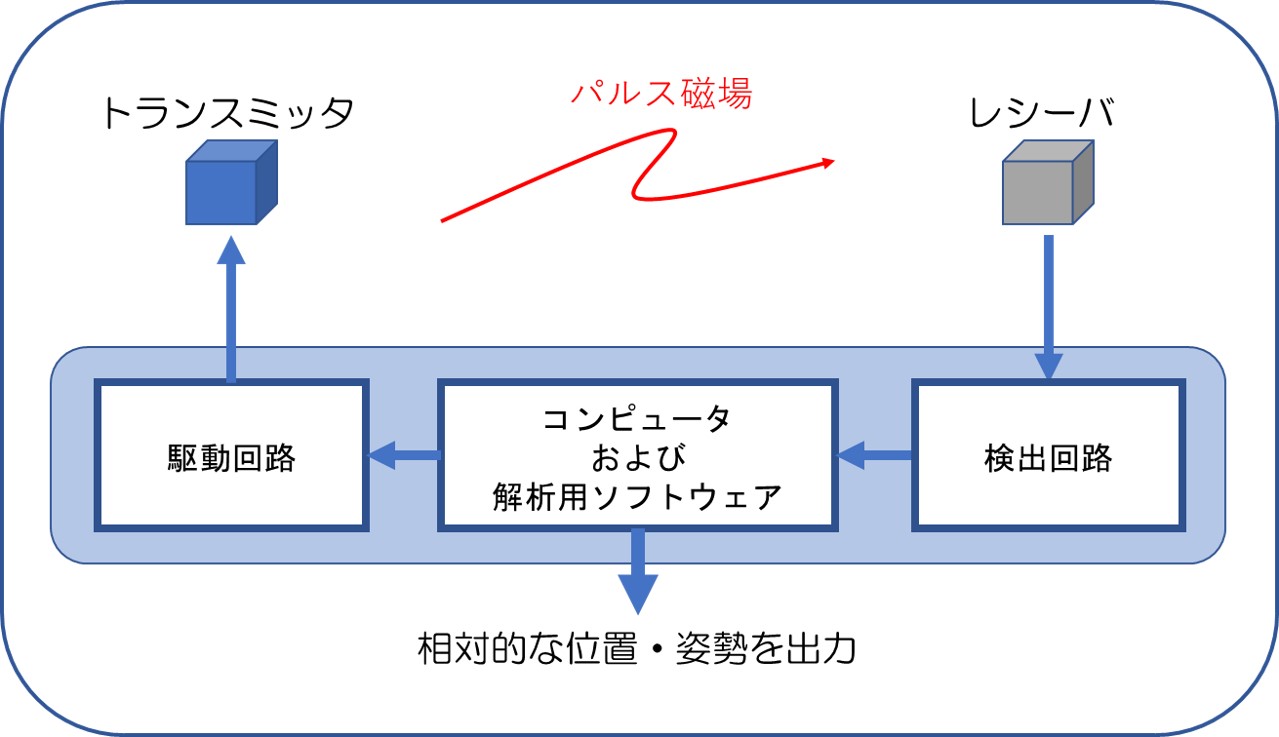
Operating principle of magnetic MoCap(Polhemus LIBERTY)
The receiver receives the pulsed magnetic field generated by the transmitter, and a current flows through the coil in the receiver due to electromagnetic induction. The position and orientation of the receiver relative to the transmitter are obtained by digitizing this current through the detection circuit, computer, and analysis software.
The receiver's position and orientation are measured using a magnetic field, which, unlike optical MoCaps, enables high-resolution measurements even when the receiver moves into the camera's blind spot. On the other hand, there are some points to keep in mind, such as keeping objects that affect the magnetic field away from the receiver.
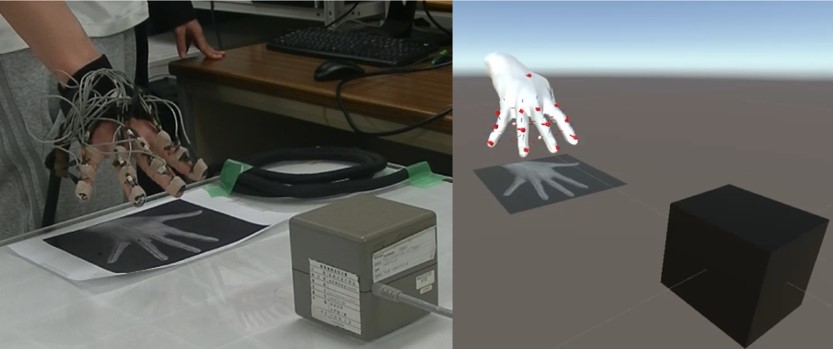
Development of a hand dexterity movement reproduction system
The whole body movements of a human being can be measured relatively easily with MoCap, and can be reproduced and visualized in a virtual space. On the other hand, when reproducing the movements of an individual's hands and fingers, it is difficult to measure because each hand is different in size and finger length, and the fingers have many moving parts and short phalanges, which easily fall into the blind spots of the camera. Therefore, even if the MoCap data of the fingers are drawn as is in the virtual space, the endpoints are not accurately reproduced because of the misalignment between the actual fingertips and the endpoints due to the effect of the rotation axis of the joints.
In this study, we aim to construct a hand model created using 3D scan data of the fingers, and to construct a system that reproduces hand dexterity movements by taking advantage of the features of the high-resolution magnetic MoCap.